Instruments de bord avec RCCL : montage
du boitier
Le tube de Pitot est monté sur un petit pylône qui comporte les
capteurs de pression, l'accéléromètre et les gyroscopes.
Ce pylône est amovible: on peut facilement utiliser un seul pylône pour
plusieurs planeurs. (ou avion ...).
Le pylône est porté par une embase fixée à demeure dans le
planeur et reliée par 4 fils à l' Arduino . (suite
du montage)
Pylône
Le pylône est réalisé par une imprimante
3D . La conception est faite avec OpenScad , voici le fichier et une image des composants:
Il faut remarquer que ce fichier est "paramétrique", des dimensions comme
le diamètre du tube de Pitot sont facilement modifiables.
Ici le dessin est fait pour un tube extérieur de 5mm de diamètre
(extérieur) et un tube intérieur de 2mm.
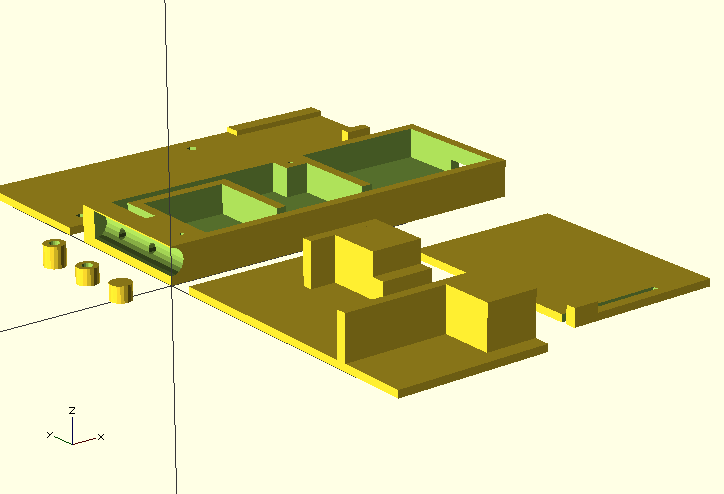
De gauche à droite:
- le couvercle du boîtier
- le boîtier : on voit à l'avant les 3 bouchons qui seront insérés dans
le tube de Pitot. L'avant du boitier est creusé au diamètre du tube. Il
est relié par deux canaux aux deux chambres.
Modification: insérer deux tubes en laiton dans
ces trous puis combler le demi-cylindre avec du silicone . Relier le
tube de pitot par deux bouts de durite, ce qui permet au tube de
bouger par rapport au boitier, en cas de choc.
La première chambre comporte la capsule barométrique pour la pression
statique.
La deuxième chambre est destinée à la pression dynamique.
La troisième chambre comportera l'IMU et le connecteur
- l'embase et son couvercle.
Remarquez au bord du couvercle une languette qui porte un bloc en
surépaisseur, destiné à verouiller le boitier. On écarte la languette
pour insérer le boîtier dans l'embase et ensuite le boitier est
verrouillé
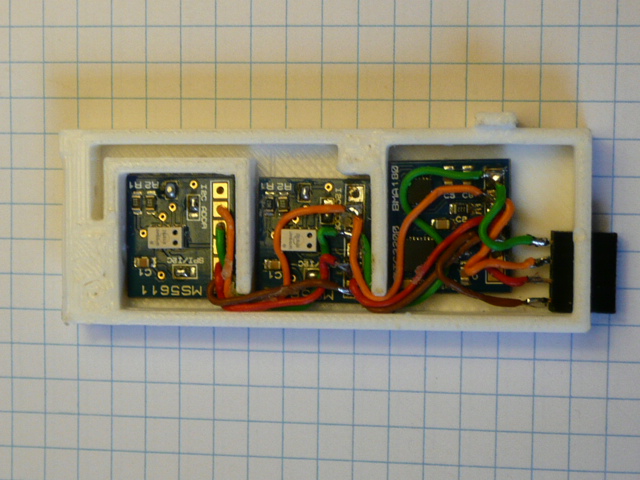 Une
photo après montage des composants:
Une
photo après montage des composants:
Les capteurs utilisés sont connectés sur un "bus" I2C sous 3,3V. Ceci permet
de connecter tous les capteurs aux 4 fils+
Mes conventions de couleur sont avec un fil de servo et un 4ème fil
vert. Ce sont des fils fins , dont le diamètre externe est 1mm.
- noir = masse
- rouge = 3,3V (fourni par l'Arduino)
- orange = signal SDA
- vert = horloge SDC (ou SCK)
En soudant les fils on crée une épaisseur de soudure sous le circuit
imprimé.
Il faut coller l'IMU sur un scotch double face suffisamment épais, de telle
façon que le circuit est exactement parallèle au fond du boîtier et bien
calé contre les bords du boîtier. Vérifier en se connectant à l'émetteur
avant de sceller le boitier !
Pour les capsules barométriques, il faut également les fixer pour éviter
toute vibration inutile.
Le passage des fils et le boitier sont scellés avec un joint de silicone de
bonne qualité. J'ai utilisé un Loctite 595, qui est un adhésif ET un agent
d'étanchéité.
- mettre joint de environ 2 mm de diamètre sur tout le plan de joint du
boitier
- dans le passage de fils, mettre du silicone, puis un fil, puis du
silicone...jusqu'à ce que les 4 fils soient placés et bien entourés de
silicone
- le silicone peut déborder sans danger : les capteurs de pression sont
éloignés des parois
Vérifier qu'il n'y a aucune fuite :
- simplement en soufflant par la durite de pression dynamique , l'autre
étant dans l'eau - il ne peut pas y avoir des bulles
Mettre le côté "connecteur" dans l'eau et vérifier qu'il n'y a pas de
bulles
- avec le menu "BARO"
Capteur de
pression MS5611
Le plan de câblage est clairement fourni par cette image de Drotek. Ici
c'est un arduino mini pro classique: les pins I2C sont placées différemment.
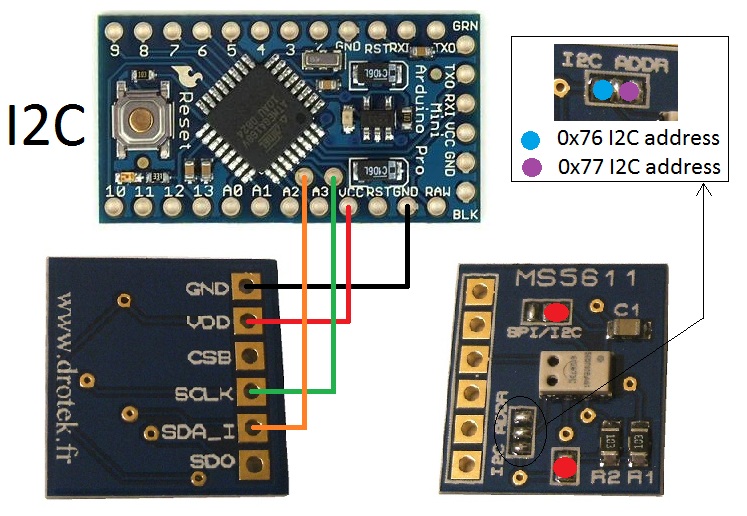
Ne pas oublier la préparation des ponts de soudure :
- points rouges de la photo
- l'adresse I2C :un capteur avec l'adresse 076 (point bleu) et l'autre
avec l'adresse 077(violet)
Utiliser 076 pour la pression statique, 077 pour la pression dynamique)
Le tube de Pitot
Il
est réalisé très facilement avec un tube extérieur en aluminium (diamètre
ext.=5mm) et deux tubes de diamètre 2mm.
Deux durites font la liaison avec le boitier.
C'est simple ! (voir 0.Segoin
pour les détails)
J'ai également commandé un tube fabriqué pour Eagle Tree.
Copyright 2012 Robert
Spilleboudt - Tous droits réservés.
Projet
rcopensource - Licence GPL V2