Instruments de bord avec RCCL
composants retenus
 Les composants choisis ici sont facile à assembler, sans
circuit imprimé.
Les composants choisis ici sont facile à assembler, sans
circuit imprimé.
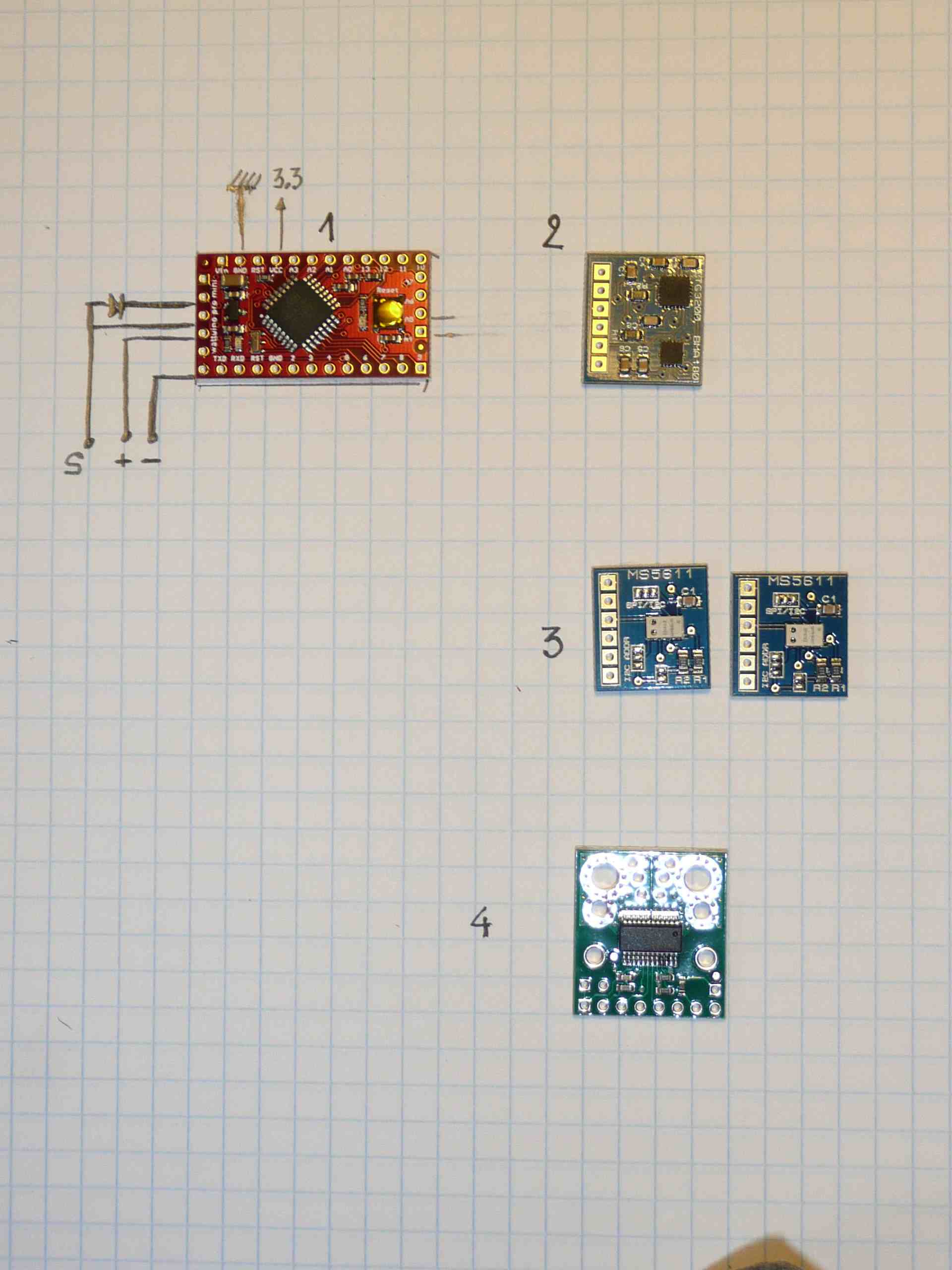
- Arduino Mini Pro 3.3V
C'est petit et compatible avec les capteurs digitaux , souvent en 3,3V
Ici la version de watterot,
qui a dispose de pins I2C accessibles à droite
à gauche le connecteur utilisé pour programmer (relié à une porte USB)
et pour la liaison avec le récepteur. (mais n'importe quelle autre
version Pro Mini 3.3V convient)
- 6 entrées ADC libres
- 12 portes digitales
- porte I2C utilisées pour les capteurs IMU
Remarque: alimentation
4,8V ou 6V par le récepteur, reliée à la pin Vin de l'Arduino (photo
incorrecte).
Pour programmer l'arduino il faut un adapteur FTDI en 3,3V (Sparkfun)
La connexion au récepteur comporte une diode (1N4148 ou similaire)
- IMU
6
axes (origine drotek) connecté en I2C
comporte un accéléromètre 3 axes BMA180 et un gyroscope 3 axes ITG3200.
(8/2013 : n'est plus disponible - à remplacer par un MPU6050)
- 2 baromètres de précision MS5611
connectés en I2C, pour mesurer la pression statique et la pression
dynamique.
- entrées analogiques pour mesurer la tension de batterie de réception
et de propulsion (prévoir les résistances pour le diviseur de tension)
- entrée digitale pour un compte-tours (à développer: branché sur
l'un des fils d'alimentation du moteur brushless)
- une mesure de courant qui sera insérée sur la propulsion.
Plusieurs possibilités:
- sur la photo plus haut un ACS709
connecté masse, VCC (3,3v) et une entrée ADC
mesure de courant 75A maximum , 30A en continu
- CSLT6B100 (voir Mouser), ce composant de petite dimension est
attrayant pour un montage à demeure, il est simplement traversé par un
câble d'alimentation , avec 3 fils pour la connexion.

-mesure de courant jusqu'à 100A (le trou fait 5,2 mm, on
peut augmenter la sensibilité avec plusieurs tours)
-connecté masse et Vin car ce capteur est prévu pour 5V
-1 entrée ADC pour le signal qui varie autour de Vin/2
-mesurer la tension d'alimentation Vin avec un diviseur (nécessaire pour
connaître la tension "zéro courant")
Tube de Pitot
Pour mesurer la pression statique avec précision, mieux vaut éviter une
capsule placée dans le fuselage. Il faut une sonde de Pitot.
Pour fabriquer cette sonde, voir http://voiletech.free.fr/skyassistant/pitot.htm
et aussi 0.Segoin
qui fournit une excellente documentation.
Vous y trouvez la différence de pression à mesurer, par exemple à 25 km/h on
mesure 29Pa...comparez aux spécifications des capsules barométriques, la
plupart ne sont pas adaptées à des pressions aussi faibles. C'est ce qui
explique le choix du MS5611.
Il y a des fournisseurs :
-la sonde Jeti , voir http://www.rc-easy.com/shop/product_info.php?info=p1399_Staurohr-f-r-JETI-Duplex-Telemetriemodul-Mspeed.html
diamètre 3mm - tubes laiton diamètre ext 1mm
-la sonde EagleTree voir http://www.studiosport.fr/remplacement-sonde-pitot-p-446.htm
ou Emcotec (http://shop.rc-electronic.com/)
diamètre 4mm, fourni avec tubes silicone pour tube laiton de 2mm
Vous trouvez en montage la suite.
Budget
boitier: les capteurs principaux environ 60€ (en principe un seul boîtier
pour plusieurs avions)
2* MS5611 14,90*2
1* IMU 27,90
par planeur ou avion
1* Arduino 14,95
pour la batterie de propulsion un ACS709 (9,11€ ) ou
un CSLT6B100 (9,54€) et quelques résistances
Copyright 2012 Robert Spilleboudt - Tous droits réservés.
Projet rcopensource -
Licence GPL V2