Instruments de bord avec RCCL : montage
de l'Arduino
L'Arduino est très bon marché et monté à demeure, ce qui permet
d'adapter très facilement le programme à la configuration de l'avion.
Dans le cas le plus simple, sans capteurs pour une propulsion électrique,
les quelques fils nécessaires sont directement soudés à l'Arduino.
Pour une propulsion électrique , les capteurs sont montés à demeure(c'est le
plus facile) et parfois une petite plaque à ligne est accolée à l'Arduino
pour porter les quelques résistances nécessaires.
Arduino sans
capteurs pour la propulsion électrique:
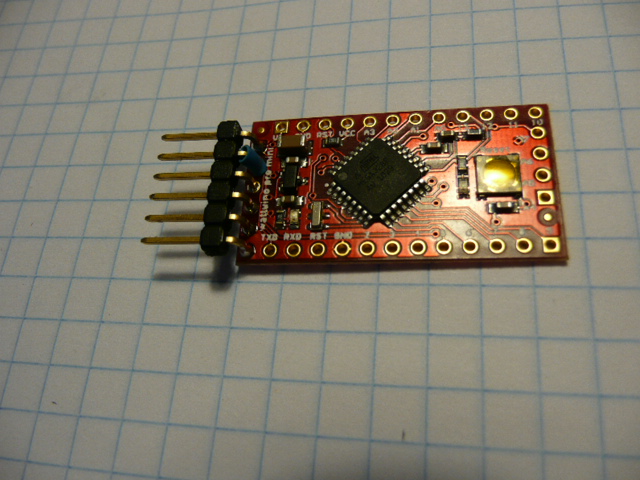
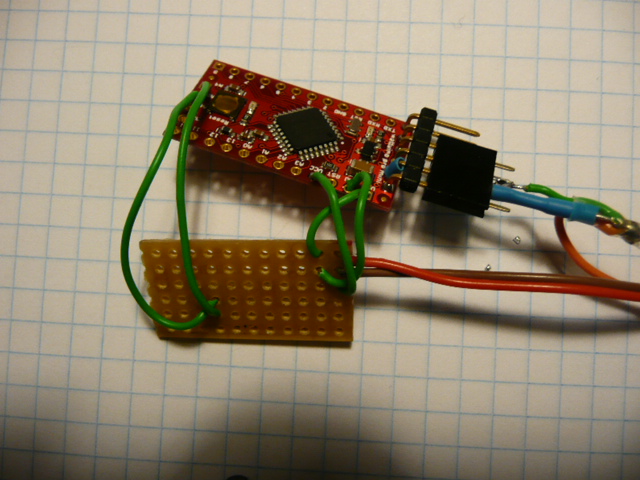
 Souder un connecteur à 6 voies sur l' Arduino,
doit ou comme ici coudé, selon la place disponible.
Souder un connecteur à 6 voies sur l' Arduino,
doit ou comme ici coudé, selon la place disponible.
Remarquer le petit bout de gaine bleue qui devra correspondre au fil bleu
ci-dessous (avec la diode).
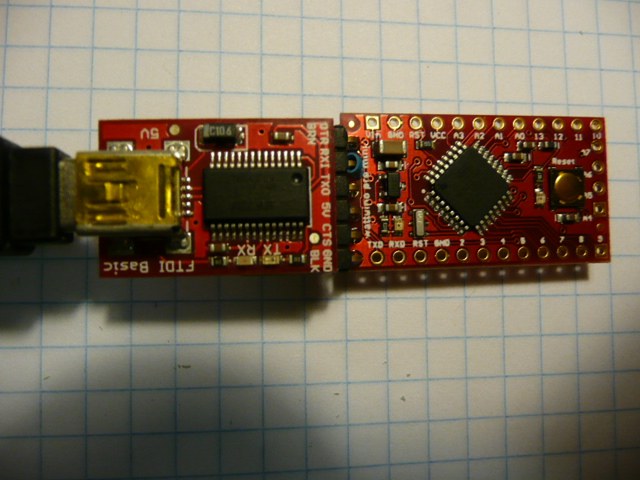
La photo de droite montre le circuit FTDI pour la programmation (= charger
un programme dans l' Arduino ).
Ci-dessous vous voyez le connecteur normal, utilisé en vol.
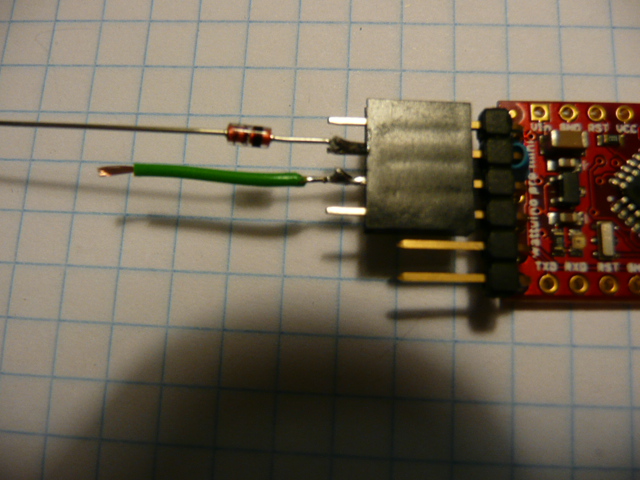 Ce connecteur fait la liaison avec le récepteur Jeti
(connecteur EXP): les fils + et - sont reliés aux entrées Vin et Gnd de l'
Arduino. J'utilise un connecteur femelle , à 6 voies.
Ce connecteur fait la liaison avec le récepteur Jeti
(connecteur EXP): les fils + et - sont reliés aux entrées Vin et Gnd de l'
Arduino. J'utilise un connecteur femelle , à 6 voies.
Le fil "signal" est dédoublé; il est relié directement à l'entrée Rx et
relié par une diode à l'entrée Tx.
Remarquez le petit bout de gaine bleue qui marque où il faut connecter la
diode
On soude 4 fils pour la liaison I2C vers le pylône (voir montage)
- noir = masse
- rouge = 3,3V (fourni par l'Arduino)
- orange = signal SDA
- vert = horloge SDC (ou SCK)
Arduino avec
capteurs pour la propulsion électrique:
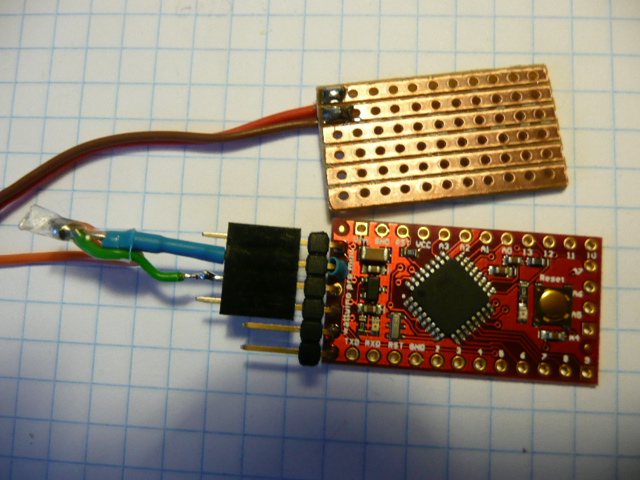
On utilise une petite plaque à lignes (6 lignes, 10 colonnes) pour
monter les résistances des diviseurs de tension (rappel: l'arduino peut
mesurer une tension de 0 à 3.3V)
Elle sera accolée à l' Arduino.
Les 6 lignes sont :
- Vin alimentation venant du récepteur
- Masse
- VCC = 3,3V fourni par l' Arduino
- libre (relais pour le diviseur de tension)
- libre
- Vbat de la batterie de propulsion
 Faire la liaison avec le récepteur Jeti
(connecteur EXP): les fils + et - sont reliés aux lignes 1 et 2 de la
plaque.
Faire la liaison avec le récepteur Jeti
(connecteur EXP): les fils + et - sont reliés aux lignes 1 et 2 de la
plaque.
Le fil "signal" est dédoublé; il est relié directement à l'entrée Rx et
relié par une diode à l'entrée Tx.
Remarquez la gaine bleue autour de la diode
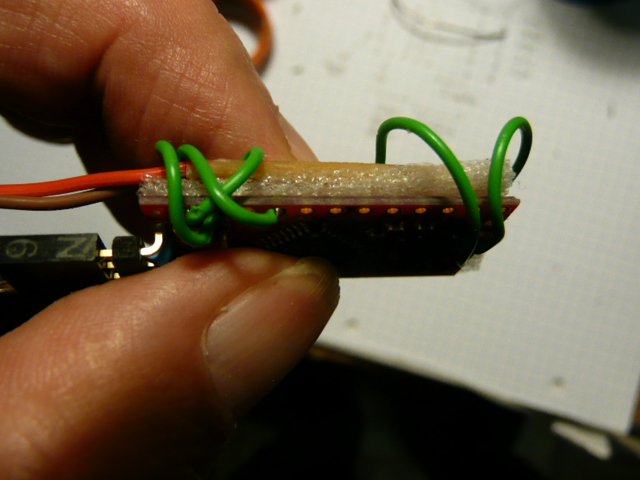 Relier
les lignes et construire ce petit "sandwich" compact.
Relier
les lignes et construire ce petit "sandwich" compact.
- Vin alimentation venant du récepteur
- Masse
- VCC = 3,3V fourni par l'Arduino
- libre
- libre
- Vbat de la batterie de propulsion
Relier les 4 fils pour la liaison I2C vers le support du boitier (voir montage)
- noir = masse
- rouge = 3,3V (fourni par l'Arduino)
- orange = signal SDA pin A4
- vert = horloge SDC (ou SCK) pin A5
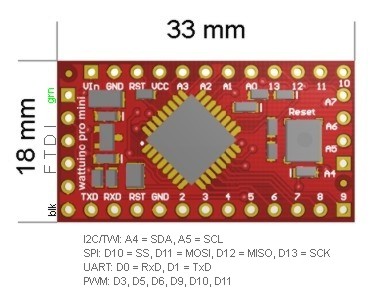
Voici en détail la version Watterot et la position des pins A4 et A5.
Capteurs analogiques:
utiliser de préférence des résistances de précision et surtout à faible
coefficient thermique , de 2,2k et 10k
- A0 tension d'alimentation Vin (souvent 4,8V ou 5V Bec si il y a une
propulsion)
utiliser un diviseur de tension 1/2 ( 2 résistances 2,2k) car la tension
mesurée doit être < 3.3V
Cette mesure est nécessaire pour le zéro du capteur CSLT6B100
Monter ces résistances entre les lignes 1-5 et 2-5 puis relier
5 à A0
- A1 tension de la batterie de propulsion VBat
utiliser un diviseur par exemple avec les résistances 1,8 /10k (divise
la tension par 1,8/11,8 )
Monter ces résistances entre les lignes 6-4 (10k) et 2-4 (1.8k)
puis relier 4 à A1
- A2 signal de la mesure de courant - connexion directe
Capteur CSLT6B100
connexion 3 fils
noir = masse
rouge=Vin, tension d'alimentation du récepteur
orange=signal de mesure de courant, directement pour A2
choisir le sens de passage du courant pour que le signal de mesure varie
de Vin/2 (courant =0) vers 0
le courant doit circuler dans le sens de la flèche ci-dessous

 une seule connexion 5 fils pour un pylône avec
propulsion électrique, amovible.
une seule connexion 5 fils pour un pylône avec
propulsion électrique, amovible.
Le pied contient le régulateur et ce petit capteur de courant.
Le BEC n'est pas utilisé.
Ajouter:
gris = signal de "gaz" pour le régulateur
(provenant du récepteur)
vert = tension de la batterie de propulsion vers A1
(avec diviseur comme indiqué plus haut)
Ceci remplace le câble classique à 3 fils par un câble de 4
fils....simple.
Capteur ACS709
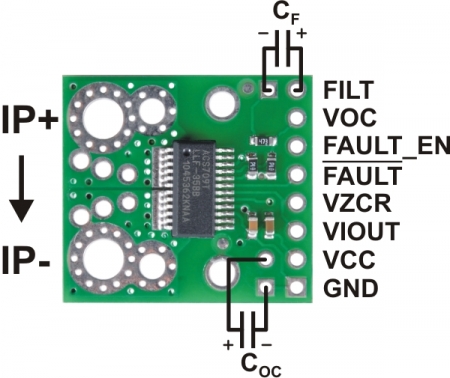 Mesure
du courant :
Mesure
du courant :
1)interrompre le câble "rouge" destiné au contrôleur du moteur et le
souder à IP+ et IP-
2)souder en IP+ un fil pour mesurer la tension, destiné au diviseur de
l'entrée A1
on peut souder la résistance de 10k entre IP+ et le fil, pour évter
d'amener la tension "élevée" vers l'Arduino
3)Souder un condensateur de 1µF aux bornes CF
Connexion vers l'Arduino : 4
fils
noir = masse GND
rouge=VCC à relier à la tension VCC 3,3V de l'Arduino
orange= VIOUT signal pour A2
vert = tension de la batterie de propulsion vers A1
Copyright 2012 Robert Spilleboudt - Tous droits réservés.
Projet rcopensource -
Licence GPL V2