Channel : choisir la voie de sortie (attention si un moteur est connecté ...enlever l'hélice)
Tout le programme RCCL consiste à transformer des variables, depuis la valeur d'un manche (-100% à +100%) jusqu'au signal de commande des servos (en µsecondes)
Les variables du programme sont exprimées en unités bien concrètes: millimètres (ou degrés si vous préférez).
A titre d'exemple, voyons la commande de roulis, avec les noms de variable que j'utilise dans mes programmes, en supposant que la valeur maximum du débattement est 25mm vers le haut
Quelle est la procédure de calibrage ?
-Connecter le capteur d'inclinaison puis l'activer avec Menu Servo. (attention au sens : un côté doit être orienté vers l'axe)
-ajouter en fin de programme ces deux lignes pour chaque gouverne.Ici l'exemple est pour un ailL (aileron gauche, selon mes noms de variable)
ailL.s LINE ailL 0 0
@V1 OUT ailL.s 1.55 .55
La première ligne prépare la transformation de la variable ailL (qui
exprime le débattement souhaité, en mm) en une variable ailL.s (commande
de servo exprimée en %).
La deuxième ligne envoie ceci vers la voie 1 du récepteur.
Remarquez que le mélangeur ne comporte provisoirement qu'un seul "point"
0,0 , il fournit toujours une variable égale à zéro ( centrée )
Editer la première ligne: quand le capteur est connecté l'éditeur
vous demande si vous voulez éditer manuellement ou ajouter un point. Vous
choisissez d'ajouter un point.
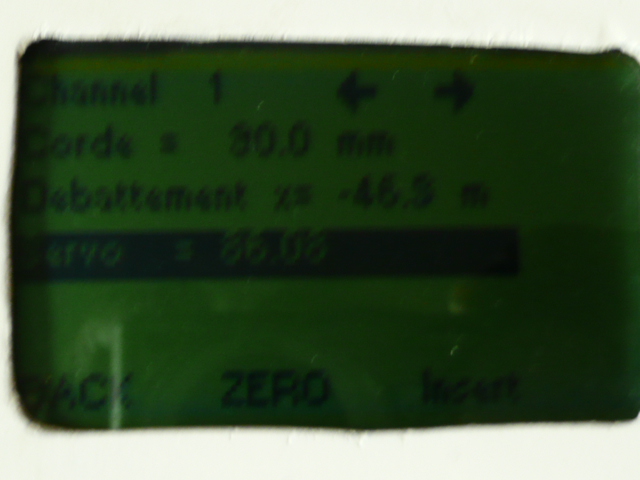
Channel : choisir la voie de sortie (attention si un moteur est
connecté ...enlever l'hélice)
Corde: sélectionner pour enregistrer la longueur de la corde
Servo: sélectionner pour déplacer le servo
ceci appelle un dialogue classique pour modifier une
variable numérique (voir la modification d'un paramètre).
tout d'abord centrer la gouverne , sélectionner
la commande ZERO puis Insert; le programme vous confirme le point inséré
Recommencez pour d'autres points : en général il suffit de noter les deux points extrêmes . Lorsque le déplacement n'est pas du tout symétrique, on note plus de points.
BACK vous ramène à l'éditeur, vous pouvez maintenant supprimer le point 0,0
Voici le résultat: le servo est calibré:
ailL.s LINE ailL 0.14 0.00 -45.50
86.08 29.29 -68.69
@V1 OUT ailL.s 1.55 .55
© Copyright 2011-2015
Robert Spilleboudt - Tous droits réservés.
Projet rccl - Licence GPL V2