Instruments de bord avec RCCL : montage
de l'Arduino et connexion des capteurs
L' Arduino Pro Mini 3,3V est très
bon marché .
On trouve des versions très bon marché, par exemple chez watterot
ou sur ebay. J'ai utilisé principalement la version Deek-Robot,
achetée sur eBay (vendeur alice1101983 )
Il existe plusieurs versions, avec une disposition des "pins" légèrement
différente pour les portes A4..A7 (c'est important car A4 et A5 sont les
portes I2C)
On utilise un Arduino monté à demeure sur un pcb auxiliaire
qui fait la connexion avec les capteurs .
Arduino :
connecteur pour programmation :
 |
 |
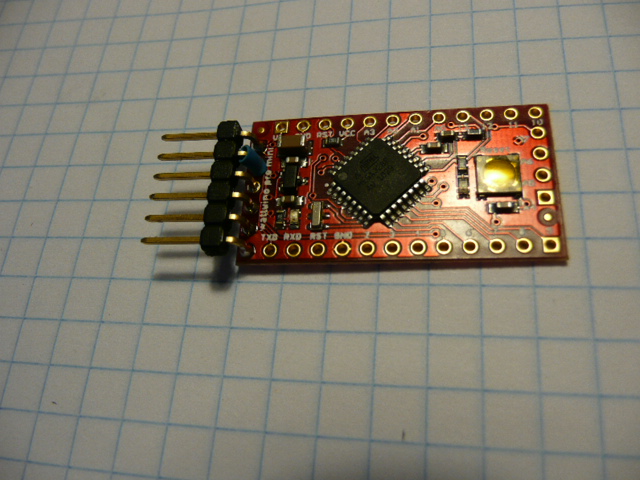
Souder un connecteur à 6 voies sur l'
Arduino, droit ou comme ici coudé, selon la place disponible.
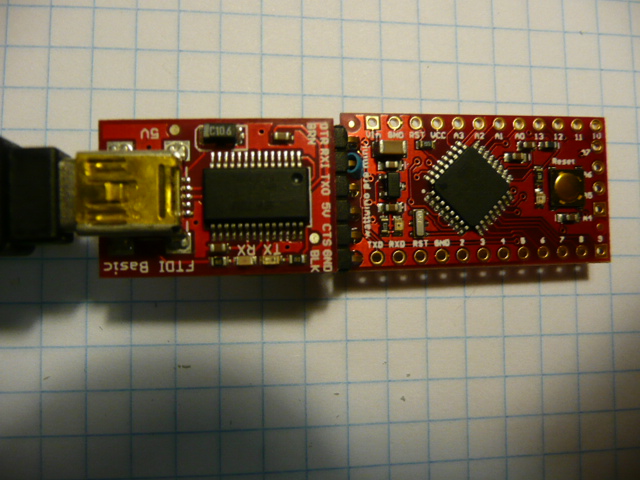
La photo de droite montre le circuit FTDI / 3.3V pour la
programmation (programmer = charger un programme dans l' Arduino ).
Comme ce connecteur assure la liaison avec le programme de
développement (Arduino IDE), la définition des 6 pins est
fixe...mais pas le sens de montage.
Sur cette photo vous avez la version de Watterot, que j'ai
utilisé au début |
 |
 |
Ici la version Deek-Robot que j'utilise maintenant...le connecteur
FTDI est monté dans l'autre sens. Heureusement il n'y a pas de
court-circuit si on se trompe.
|
Arduino : connecteur relié au récepteur Jeti :
Le câble connecté à la porte EXP du récepteur comporte trois fils:
- noir =masse, connecté au "GND" du pcb auxiliaire
- rouge= + 5V, connecté au "VIN" du pcb auxiliaire, qui alimente l' Arduino
avec la tension du récepteur
- orange= signal, connecté directement à la porte Rx et à travers une diode
à la porte Tx. La diode est conductrice dans le sens récepteur -> arduino
(diode 1N4148 par exemple) (photo plus bas)
(ceci est le signal de télémétrie)
Arduino
:connexions vers les capteurs
Le pcb auxiliaire comporte les liaisons avec les capteurs - tout est
installé à demeure.
|
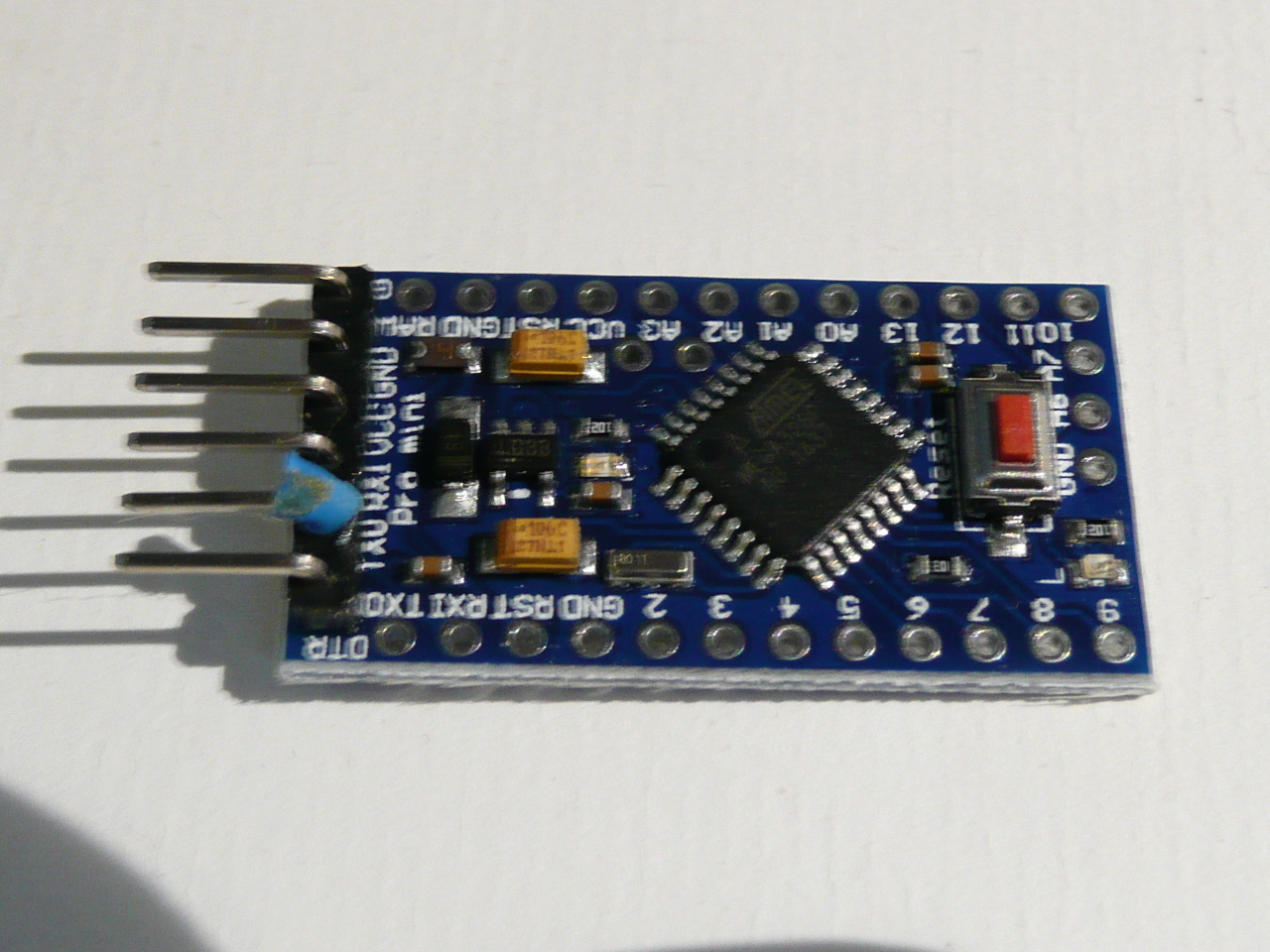
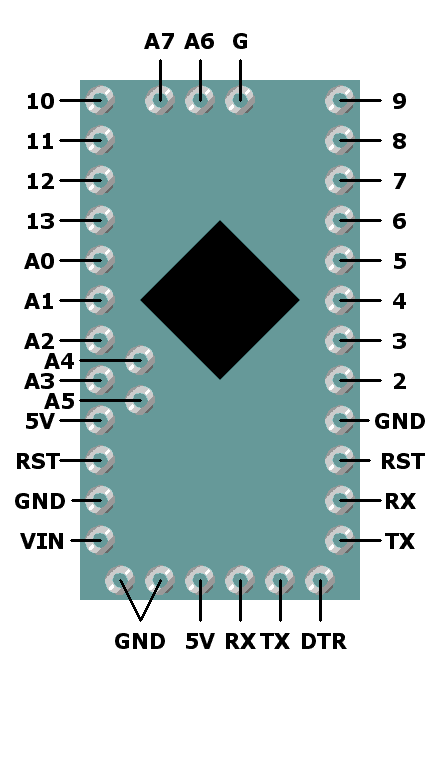
Ceci est la version Deek-Robot,
dont les définitions des pins sont ci-dessous
|
|
les portes utilisées sont :
- en-dessous: les 6 connecteurs pour modifier le programme
(adaptateur FTDI en 3,3V) ou pour se connecter au récepteur
-VIN= alimentation à partir du récepteur
-GND=masse
-5V indique le tension normale pour alimenter l' Arduino qui est sur
cette version 3,3V
-A0..A3 , A6..A7 sont des entrées analogiques (mesure de tension 0 à
3,3V)
-A4..A5 sont les signaux I2C de communication avec les capteurs
Vérifiez la disposition
des portes A4..A7 : ceci n'est pas normalisé. |
|
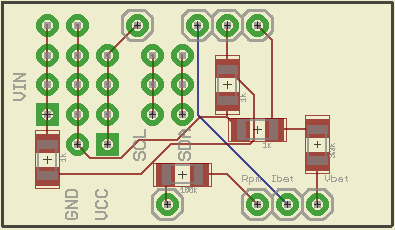
Le pcb V4a, qui est monté directement sous
l' arduino.
Les connexions entre l' Arduino et le pcb V4a sont:
- les 6 pins supérieures
- la première ligne des colonnes SCL et SDA
- la pin gauche de la rangée inférieure
La rangée supérieure est connectée aux pins correspondantes de l'
arduino ainsi que la pin gauche de la rangée inférieure.
Pour réaliser les connexions, on peut utiliser des headers
classiques mâle/femelle, avec l'avantage d'une solution démontable
mais avec l'inconvénient d'une hauteur relativement importante.
On peut aussi souder un bout de fil rigide de quelques millimètres,
c'est nettement plus compact.
Les autres portent un nom :
VIN = alimentation du récepteur (fil rouge provenant de la porte EXP
du récepteur)
GND= masse (fil noir provenant de la porte EXP du récepteur
VCC= 3,3V =
SCL,SDA = signaux I2C ; un câble de connexion I2C comporte les 4
signaux alimentation (rouge) GND (noir) SCL(vert) SDA (orange)
(ceci est utilisé pour connecter les
capsules barométriques et l'IMU)
Attention: le capteur barométrique est alimenté en 3.3V
tandis que le MPU6050 utilisé est alimenté en 5V
RPM = à connecter à l'un des 3 fils d'alimentation du moteur,pour
mesurer sa vitesse de rotation
IBAT=à connecter au capteur de mesure de courant
VBAT=à connecter à la batterie de propulsion
|
Quelques photos de l'assemblage:
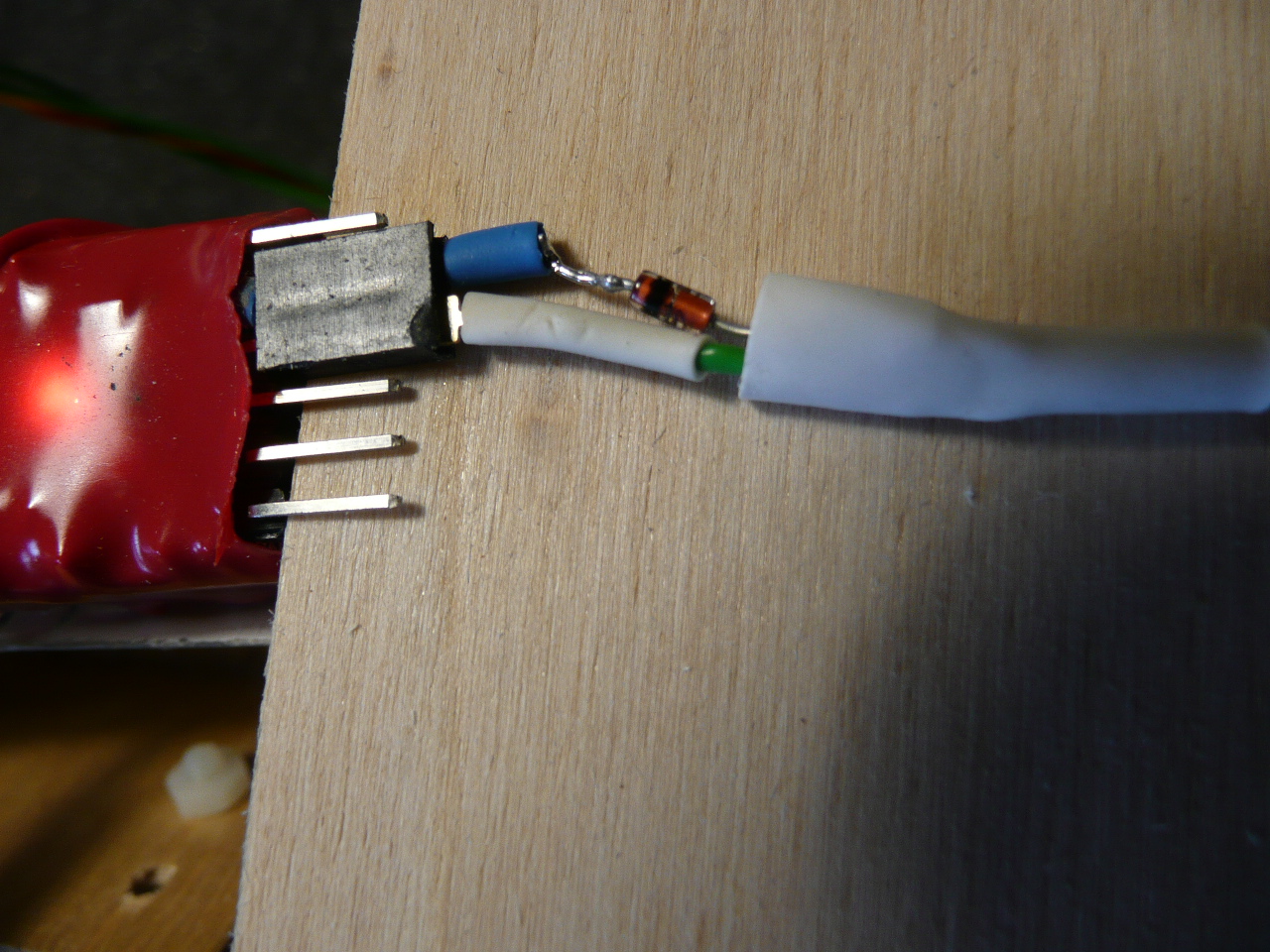 |
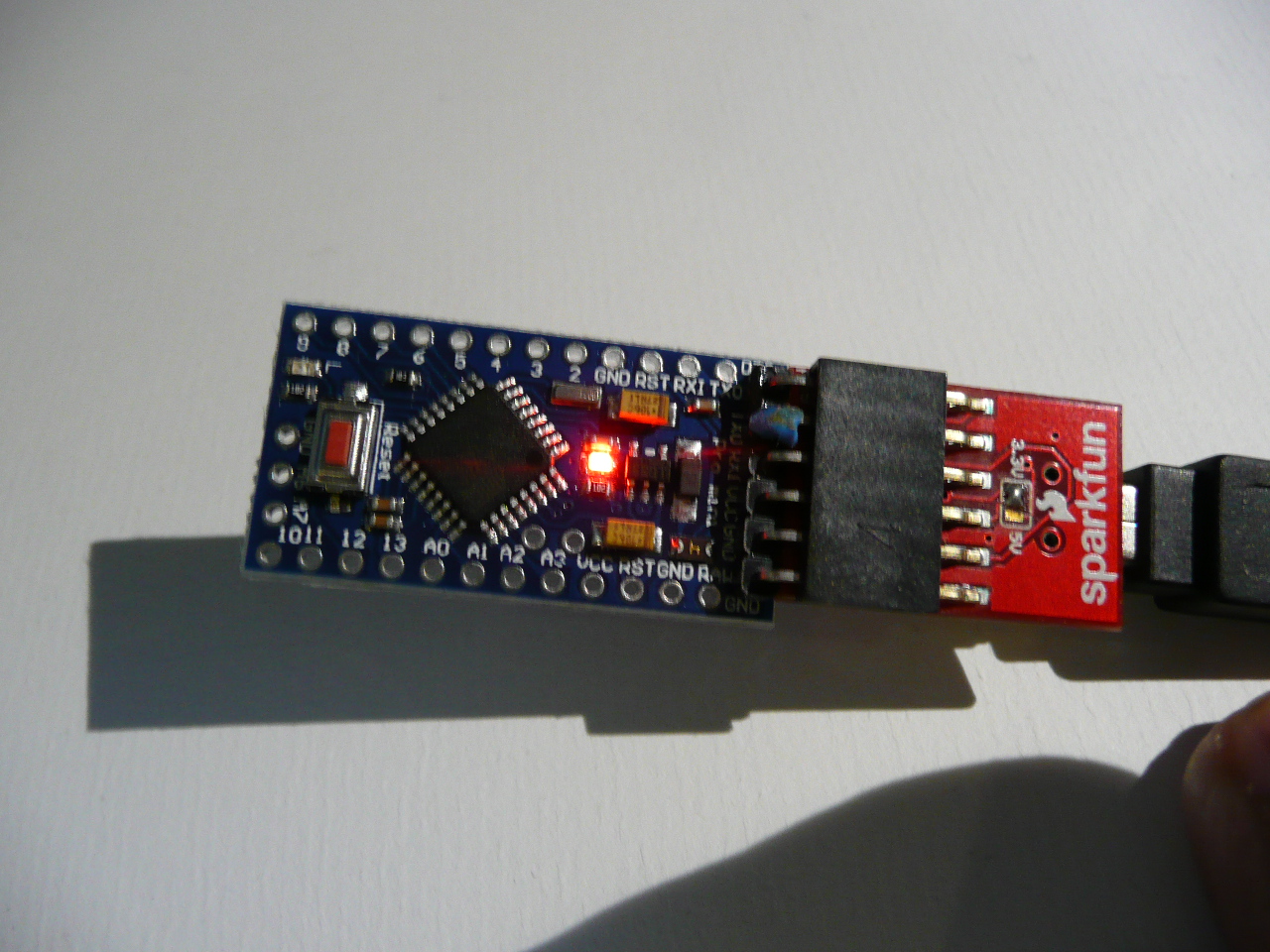
le signal de télémétrie:
la connexion RX de l' Arduino est reliée directement
la connexion TX passe par une diode :remarquez le sens de montage de
la diode
|
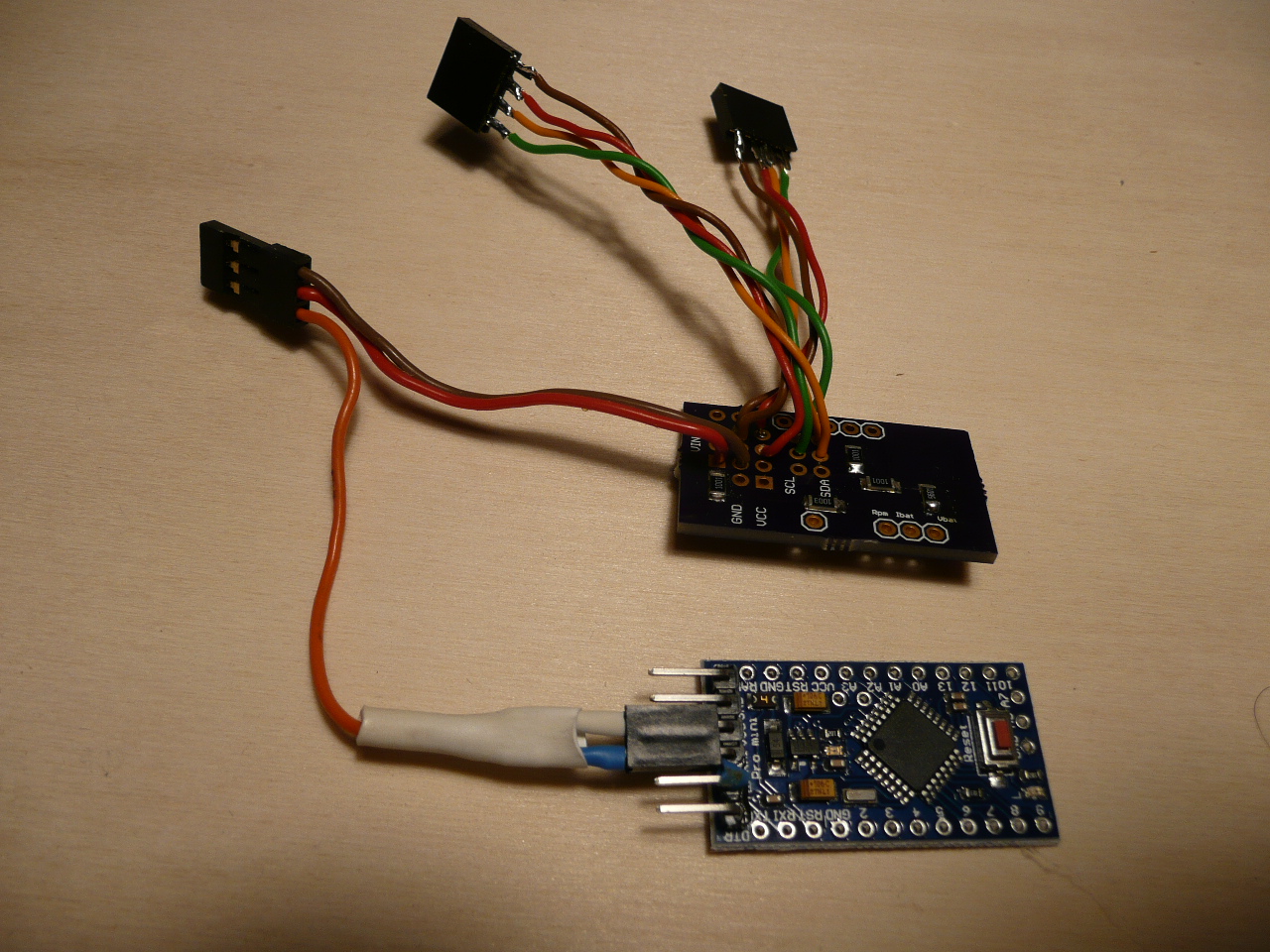 |
En haut de la photo, le pcb avec les
connexions pour les 2 capteurs I2C.( à marquer 3.3V ou 5V )
A gauche, la connexion avec le récepteur Jeti
|
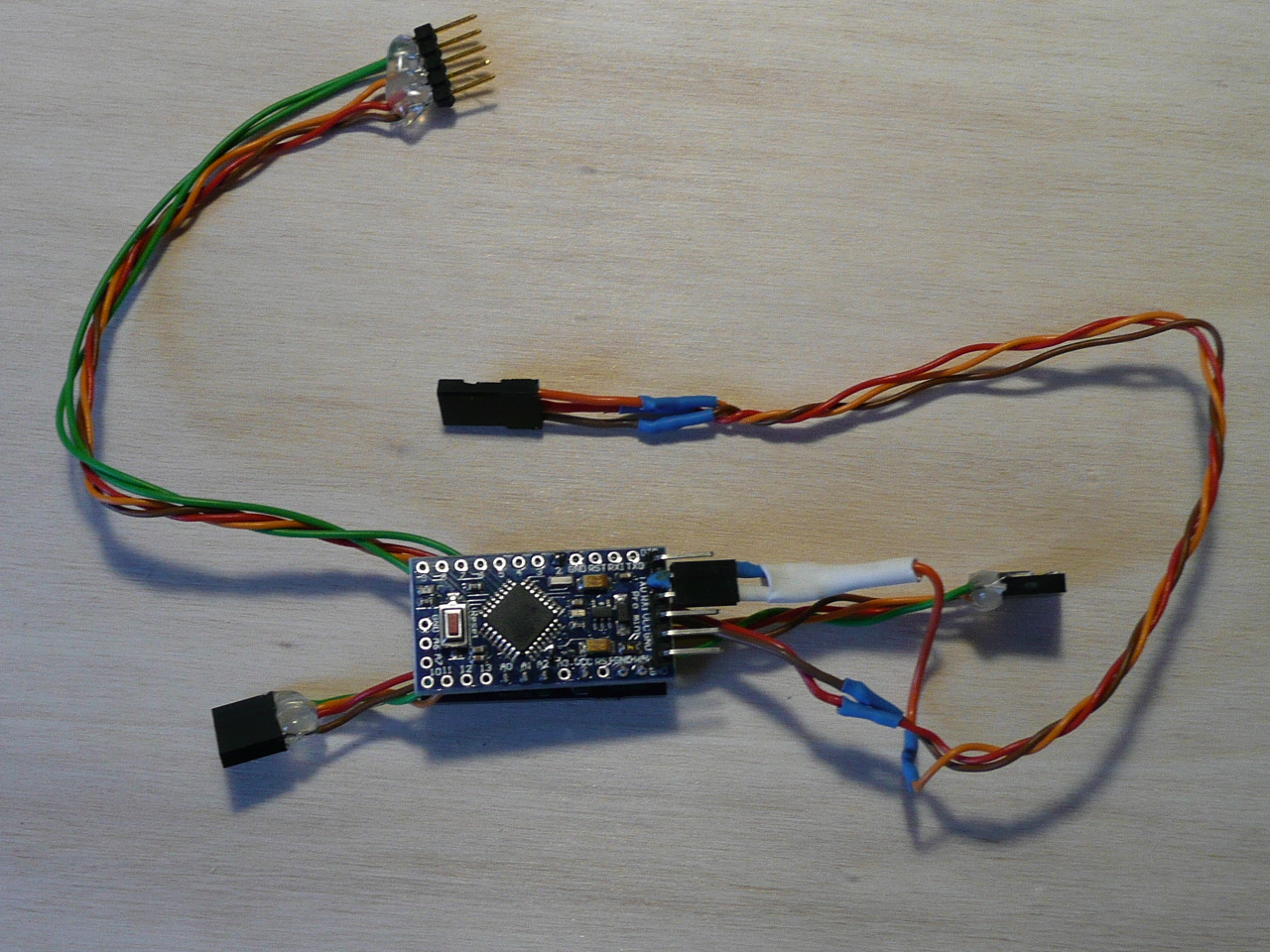 |
Assemblage final de l'Arduino et de son pcb auxiliaire, destiné à
mon Thermik XL
- de part et d'autre les deux connexions I2C pour les capsules
barométriques et l'IMU
attention : la connexion pour l'IMU est alimentée par VIN (5V)
tandis que la connnexion barométrique est alimentée par VCC (3,3V)
-en haut un connecteur électrique , qui comporte brun (masse)
, rouge(+ VIN) ,orange (mesure de courant CSLT6B100 ) , vert( VBAT )
et un deuxième fil vert (RPM)
-à droite le connecteur vers le récepteur Jeti
|
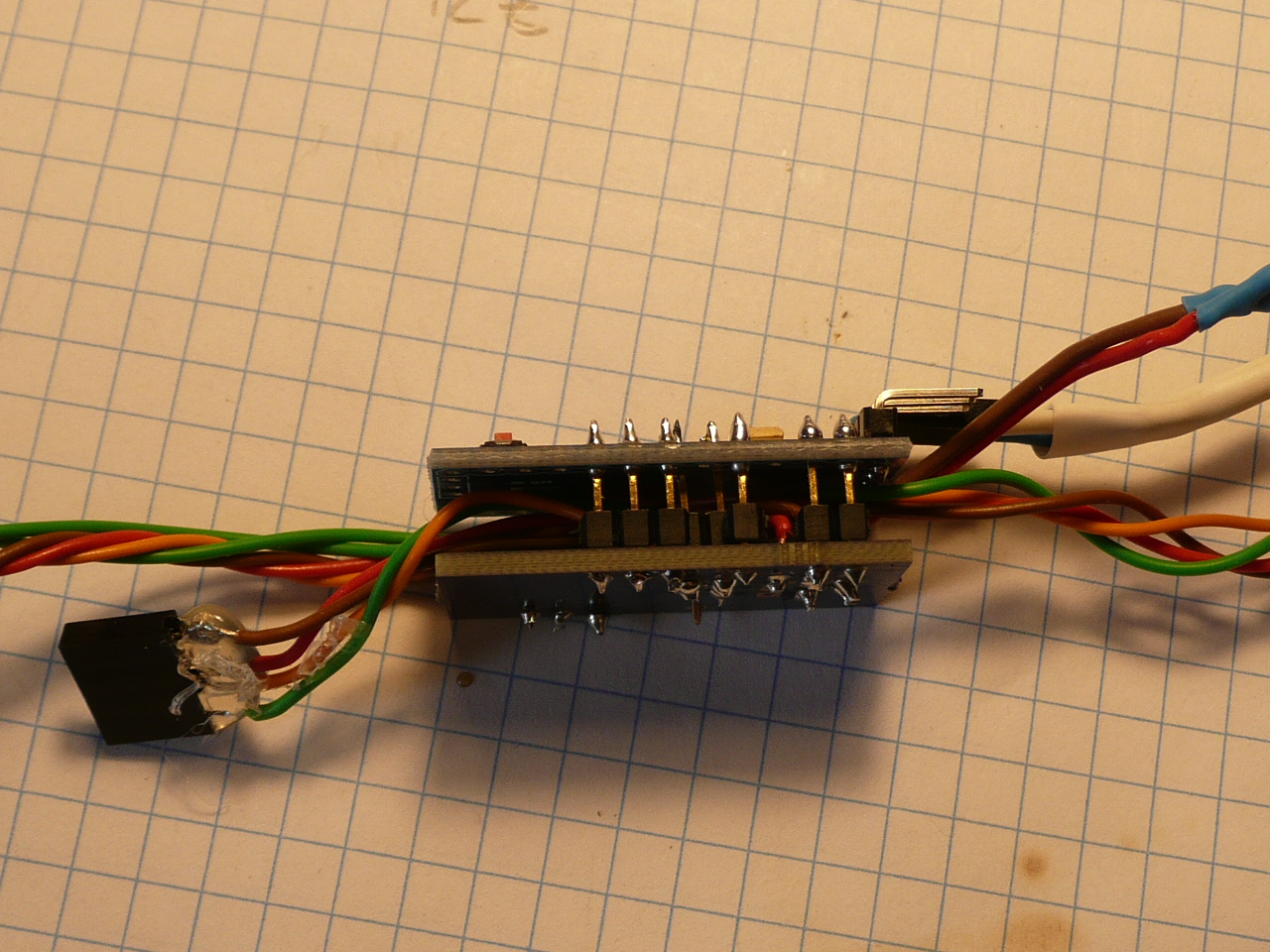 |
Pour gagner de la place l'Arduino (en haut) et le pcb auxiliaire
sont soudés l'un à l'autre avec des "headers" mâle classique
|
Copyright 2012 Robert Spilleboudt - Tous droits réservés.
Projet RCCL - Licence
GPL V2