Instruments de bord avec RCCL
capteurs retenus
Mesures de vitesse , altitude et vario
Tube de Pitot
Lire l'explication très claire de 0.Segoin
pour les détails du tube de Pitot .
La différence entre la pression dynamique et la pression statique fournit la
vitesse .
Remarquez que la différence de pression à basse vitesse est très faible:
environ 0.3 mbar à 25 km/h . Pour surveiller la vitesse minimum
de décrochage, il faut donc utiliser un capteur sensible.
La mesure de pression statique est également utilisée pour la mesure
d'altitude et le vario.
 |
En haut, la sonde vendue par Jeti, poids
=1.9 g pour environ 20€
Au centre la sonde de Eagle Tree , poids =3g pour environ 12€, qui
m'a servi de modèle pour construire une série de sondes.
J'utilise un tube en laiton de diamètre externe 4mm .
Les tuyaux de connexion sont en silicone fin provenant de Esska :diamètre interne 1mm, son
poids est 3 g/m .Ils se connecte sur un tube de laiton fin:1mm
externe, paroi 0,3mm.
Pour réaliser l'embout frontal j'utilise des morceaux de tube qui s'
emboitent: 3mm externe puis 2mm externe et finalement le tube mm.
Vous trouvez ces tubes de la marque "Albion Alloys" en magasin de
modélisme bateau ou chemin de fer , .
En bas, mon premier tube , poids = 3,2 g, fabriqué avec un tube
extérieur de 5mm en alu et des tubes intérieurs en laiton de 2mm
Repérez le tube relié à la prise dynamique (en tête du tube de
Pitot) , le plus souvent c'est le tube qui sort tout droit.
Le tube relié à la prise statique (trous sur le côté) sort en
général sur le côté.
|
 |
Pour obtenir des mesures de vitesse répétables, je monte la sonde
de pitot de façon fixe.
Comme je n'ai plus accès à la dérive , le tube de pitot est devant
l'aile, comme la prise d'alimentation en vol d'un chasseur
moderne...
Le pylone est un profilé en forme de goutte d'eau , trouvé par
exemple chez Lindinger (référence 14933). Le tube de pitot est
inséré dans un court tube en alu, ce qui permet de le démonter
facilement pour en retirer les poussières ! |
Les capteurs de pression
Un capteur mesure la pression statique, l'autre la pression dynamique.
Le capteur MS5611 a une résolution de .012 mbar ou 10 cm d'altitude.(prix
Mouser 13.21€) .
Considérons le cas extrême d'une vitesse de 25 km/h, la différence de
pression est 0.3mbar soit une mesure de vitesse avec une résolution de
8% ( 2 * .012).
Un nouveau capteur est disponible en 2015: le MS5607 qui est quasi
identique, a une résolution de 0.024 mbar ou 20 cm d'altitude mais
son prix est nettement inférieur : 5.87€ .
Cette résolution est satisfaisante pour un planeur rapide.
L'interface de communication est I2C avec deux adresses disponibles, ce
qui est indispensable pour connecter deux capteurs.
Ces capteurs comportent une membrane très fine et sont fragiles,
il faut les monter sur une
mousse et de préférence verticalement, pour mieux résister aux chocs
d'un atterrissage.
Pour mesurer la pression il faut aussi isoler ces capteurs de l'air
ambiant, dans une "capsule barométrique" reliée par un tube de silicone à
la sonde de Pitot.
Après de nombreux essais infructueux, j'utilise des joints O-ring,
comprimés entre:
- le pcb avec les connexions électriques
- un morceau de pcb cuivré simple face , percé d'un trou pour souder le
tube en laiton (1mm )
|
Mon pcb pour les deux capteurs , MS5611 ou MS5607.Les fichiers
Eagle sont v4f.sch et v4f.brd
Il suffit d'envoyer le fichier .brd pour
- fabriquer le circuit chez http://oshpark.com/
- fabriquer le stencil auprès de https://www.oshstencils.com/
Pour souder ces capteurs il faut:
- la pâte à souder Edsyn CR44, qui est facile à appliquer en
épaisseur faible avec le stencil
- surtout pas de soudure à l'air chaud (la membrane du MS5611 n'aime
pas). J'ai utilisé la méthode "skillet" de Sparkfun
Les connexions pour mon câble I2C "normalisé" avec un connecteur
mâle :
Dans l'ordre de gauche à droite:
- brun = masse (la borne carrée à droite)
- rouge= 3,3 V
- orange = signal SDA
- vert = horloge SCL
Ces connexions sont reliées pcb V4a |
 |
Pour réaliser les capsules barométriques étanches, j'utilise deux
o-ring de diamètre intérieur 5mm et épaisseur 2mm, fournis par http://www.oring.fr
Un morceau de pcb simple face, dimension 7 * 32 mm est foré de deux
trous de 1,2mm. Les deux bouts de tube 1mm extérieur sont soudés.
|
 |
Pour assembler, un petit serre-joint au milieu et du bouts de
gaine thermo-rétractable.
C'est étanche!
Poids : 2,5g !
(Une version ultérieure comportera des trous forés pour vis de 1mm)
A gauche : la prise dynamique
A droite: la prise statique
|
|
|
|
|
Variante avec
boards
Mesures d'orientation en 6 axes: accélération et vitesse de rotation
L'utilisation principale est la "bille": mesurer l'accélération latérale.
Une toute autre utilisation possible est la stabilisation dans certaines
phases de vol, qui utilise la mesure de rotation autour des 3 axes.
J'utilise un capteur
MPU6050 de Invensense, qui est facilement disponible par eBay. On
le monte avec un ruban double-face, bien d'équerre par rapport aux axes du
fuselage.
On peut le monter horizontalement ou verticalement: la disposition choisie
est codée dans le programme.
On trouve des capteurs plus évolués, qui mesurent également l'orientation
avec un compas magnétique et même des capteurs qui réalisent tous les
calculs nécessaires pour déterminer l'orientation et la vitesse de rotation
de l'avion par rapport à la terre ( chip BNO055 , 10€ ). En complétant
ceci avec un GPS on connait la position par rapport à la terre et on peut
réaliser un pilote automatique...Ce n'est pas le but ici.
|
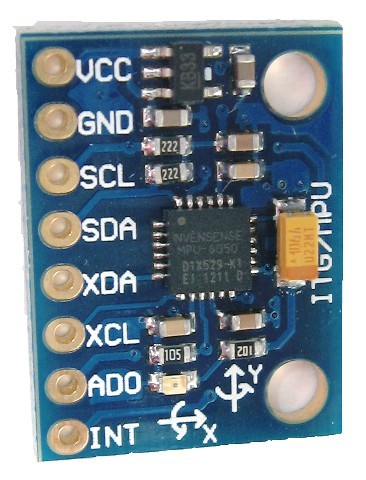
Un "board" MPU6050 achetés sur ebay. C'est un modèle
identifié GY-421. Il comporte un régulateur et il doit être alimenté
par VCC = 5V !
Les autres connexions sont classiques: masse, SDA et SCL.
Il faut encore relier l'entrée ADO à la masse par une résistance de
4,7K
Vous trouvez plus d'information ici
et même le schéma du circuit.
Remarquez les orientations des axes X,Y,Z qui sont imprimées . Il
faut en tenir compte lors de l'installation.
L'orientation normale est un circuit monté à plat comme la
photo l'indique (codage SENSOR_PLAT dans le programme config.h):
y = axe du fuselage, pointe vers l'avant
x = axe de l'aile, pointe à droite
z = axe vertical
On peut disposer le circuit verticalement en le tournant vers la
droite(codage SENSOR_VERT dans le programme config.h):
x = axe vertical, pointe vers le bas, accélération >0 vers
le bas, rotation > 0 sens inverse horloge
y = axe du fuselage, pointe vers l'avant , rot >0 roulis
vers la droite
z = axe de l'aile
|
|
|
|
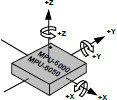
Définition des axes pour le MPU 6050
ceci est extrait de la documentation du MPU6050
Pour notre utilisation:
- quand la bille est à droite , x est négatif
comparer ces conventions à https://en.wikipedia.org/wiki/Aircraft_principal_axes
ou https://en.wikipedia.org/wiki/Axes_conventions |
Mesures électriques
Mesures de tension :
Ces mesures utilisent les entrées analogiques du microprocesseur (0
-3.3 V), avec un diviseur potentiométrique si la tension dépasse 3,3V
- A0 tension d'alimentation VIN (souvent 4,8V ou 5V Bec si il y a une
propulsion)
utiliser un diviseur de tension 1/2
- A1 tension de la batterie de propulsion VBAT, ou de la batterie qui
alimente le récepteur avec un BEC
utiliser un diviseur par exemple avec les résistances 1,8 /10k
- A2 est utilisé pour la mesure de courant IBAT
Mesures de courant :
 |
CSLT6B100  (voir
Mouser), ce composant de petite dimension est attrayant pour un
montage à demeure, il est simplement traversé par un câble
d'alimentation , avec 3 fils pour la connexion au pcb
V4a (voir
Mouser), ce composant de petite dimension est attrayant pour un
montage à demeure, il est simplement traversé par un câble
d'alimentation , avec 3 fils pour la connexion au pcb
V4a
noir = masse, relié à GND
rouge=VIN, tension d'alimentation du récepteur
orange=signal de mesure de courant, relié à IBAT (entrée ADC A2)
valeur : VIN/2 pour courant = 0 ; 0 pour courant = 100 A
sur la photo vous voyez un 4ème fil vert qui est la tension de
propulsion VBAT |
 |
-le courant doit circuler dans le sens de la flèche pour que
la tension mesurée varie entre VIN/2 et 0 pour un courant variant de
0 à 100 A
- mesure jusqu'à 100A (le trou fait 5,2 mm, on peut
augmenter la sensibilité en faisant passer le courant plusieurs
fois, avec plusieurs tours) |
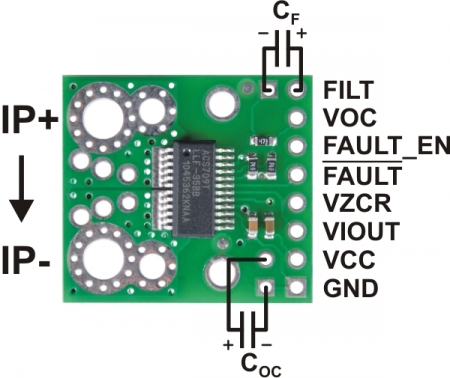 |
ACS709
est un autre capteur possible
connecté masse, VCC (3,3v) et une entrée ADC
mesure de courant 75A maximum , 30A en continu |
Cas particulier du pylône:

|
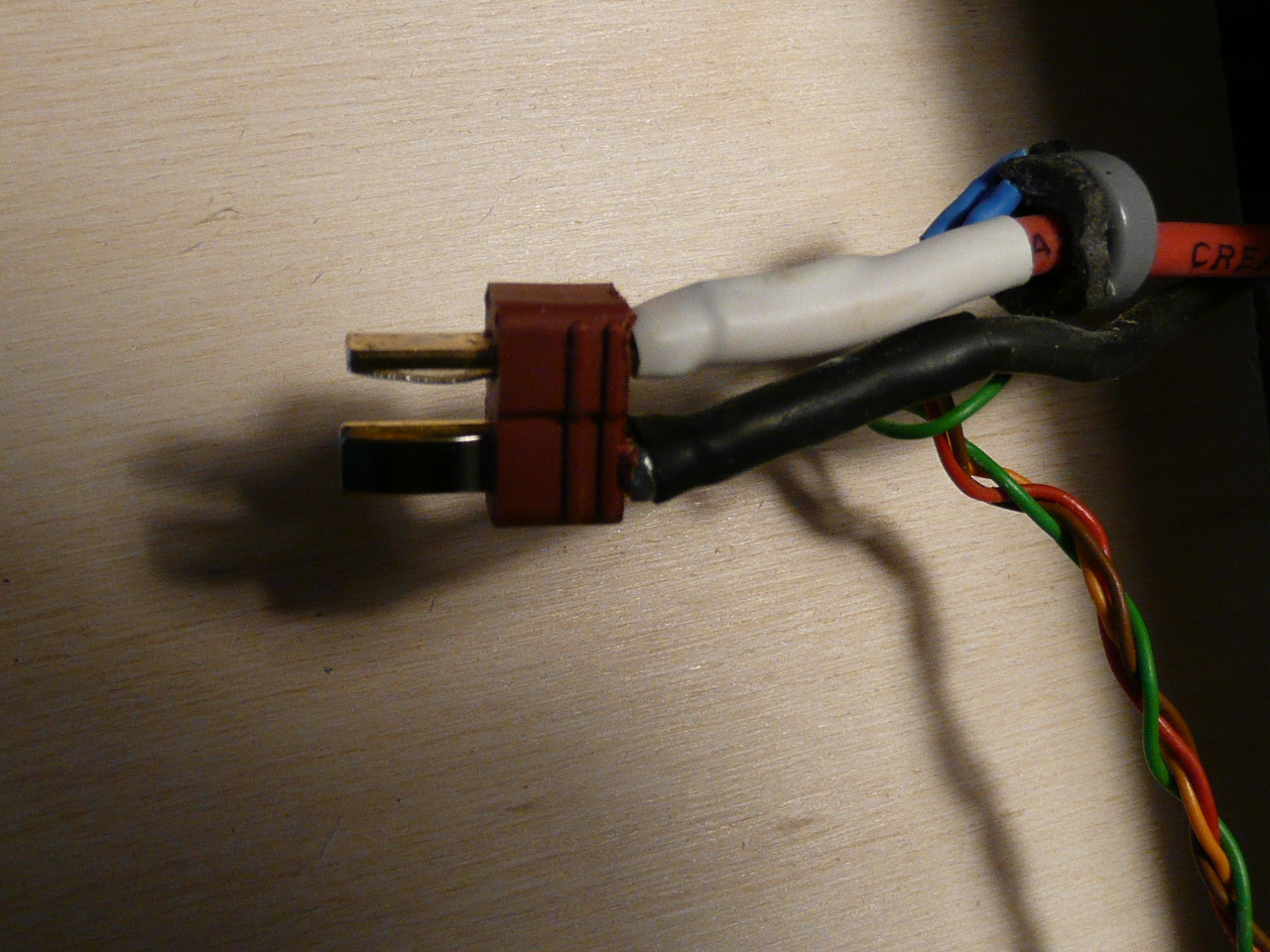
Pylône amovible monté sur l'aile.
Le pied contient le régulateur et le capteur de courant CSLT6B100
(éventuel).
Le BEC du régulateur n'est pas utilisé.
Une seule connexion 5 fils :
- masse (noir)
- tension VIN du récepteur (rouge)
- mesure du courant (orange)
- signal de "gaz" pour le régulateur (gris)
- tension de la batterie de propulsion VBAT (vert)
|
Mesures de vitesse de rotation :
Pour un moteur brushless, on relie l'un des fils d'alimentation du moteur
(un des 3 fils entre le régulateur et le moteur) à l'entrée RPM de pcb
V4a
Copyright 2012 Robert Spilleboudt - Tous droits réservés.
Projet RCCL - Licence
GPL V2
