Instruments de bord avec RCCL
Communication avec le récepteur Jeti
et dialogues de la JetiBox
Démarrage:
- immobiliser le planeur - mettre une gaine sur le tube de pitot pour le
protéger du vent
- allumer l’émetteur .
Il dicte le nom du planeur puis attend un signal du récepteur.
- allumer le récepteur ( sans connecter la batterie de propulsion si il
y a une batterie de réception)
- attendre environ 10 secondes en gardant le planeur immobile pendant
l'initialisation des capteurs
(pendant ce temps la led verte de l'arduino est allumée et
l'écran de l'émetteur n'a pas la communication avec le capteur)
-tester la télémétrie en demandant une mesure
(appuyer sur le bouton de demande)
Calibrage initial : mettre le planeur
rigoureusement à plat puis utiliser le menu de calibrage mentionné plus
bas
A répéter après modification du programme ( le chargement du programme
efface les mémoires EEPROM)
Consommation de la batterie de propulsion
si nécessaire, remettre le cumul à zéro (voir les options de
Les variables de télémétrie sont transmises au sol par protocole Jeti,
avec un récepteur et un module d'émission Jeti (en version de base ou EX).
Elles sont lisibles sur une JetiBox ou par l'émetteur RCCL V4.
Chaque écran du dialogue comporte deux lignes de 16 caractères.
Les dialogues sont utilisés de deux façons:
- pour une utilisation semblable aux autres capteurs de Jeti . La
navigation se fait avec les boutons de la JetiBox , manuellement ou
grâce à l'émetteur Rccl V4 automatiquement .
- un dialogue rapide où les variables principales sont transmises en un
seul écran de 2*16 bytes, renouvelé toutes les 80 msec.
Le point d'entrée est un écran qui affiche le nom en première ligne le
nom Rccl Instr ; la deuxième ligne est libre.
Commençons par le premier mode: à droite de ce premier écran on trouve
une colonne par senseur
- IMU = les mesures calculées
1ère ligne IMU suivi de l'accélération latérale
2ème ligne : angle du virage , accélération par rapport à l'axe
terrestre
En dessous on trouve le détail
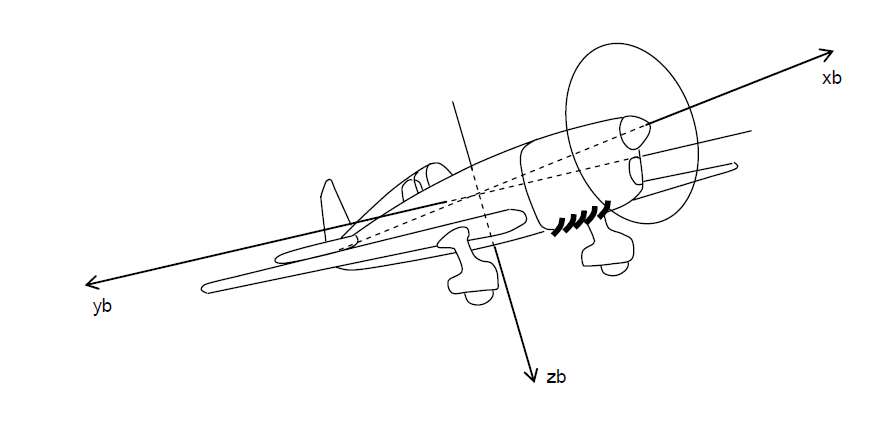
- Acc = les mesures de l'accéléromètre pour les axes
relatifs à l'avion x(vers la droite) , y (vers l'avant) et z (vers le
bas).
Unités: en g avec 2 décimales
Pour calibrer l'accéléromètre :
placer le planeur de façon parfaitement horizontale, puis
sélection à droite avec 3 possibilités
- à droite = confirmer pour enregistrer
la position
- à gauche= retour sans modification
- en bas = remise à zéro
- Gyro = les mesures de rotation angulaire, autour des même
axes x=tangage (autour de l'aile) , y=roulis , z (vers le bas)
Unités: degrés/seconde
- BARO = les mesures de pression provenant des deux capsules
barométriques
1ère ligne : vario avec compensation d'énergie totale) en m/sec
2ème ligne : vitesse (m/sec)
En dessous le détail
- altitude (m) et pression statique (millibar)
- la deuxième ligne affiche la différence de pression par rapport à la
pression initiale.
Le premier nombre est la pression statique , exprimée en Pascal.
Le deuxième nombre est la pression dynamique.
Utilisation: vérification avant mise en
service
Vérifier l'étanchéité des joints: si on souffle dans un des tubes,
l'autre pression ne peut pas changer.
Vérifier l'étalonnage: une pression de 10 cm d'eau doit indiquer
981 Pascal
- ELEC affiche en première ligne la tension du
récepteur (x,x V)
- le détail pour la batterie de propulsion, si elle existe
tension (xx,x V) et consommation ( xxxx en mAh)
- sélection "erase" gauche + droite pour mettre la consommation à zéro
(quand on a remplacé la batterie par une batterie chargée)
Voir les options
Sous le premier écran on trouve l'écran compact destiné aux
automatismes de l'émetteur.
Le premier écran regroupe les données indispensables qui sont ainsi
accessibles sans perte de temps.
Ceci est le nom tel qu'il est utilisé dans Sensor .h et Sensor.ino
- varioE vitesse verticale avec la compensation d'énergie
- beta l'inclinaison du virage
- speed_IAS vitesse de vol
- un code réservé pour la notification d'une alarme , dont le détail
figure dans un autre écran
- l'angle d qui correspond à l'accélération latérale (bille)
- rxV :la tension du récepteur
- altitude relative au point de départ
- un code réservé pour un "statut", qui est modifiable par les touches
< >, ce qui permet au programme de l'émetteur d'agir sur le
programme de l'Arduino.
En-dessous on peut avoir un deuxième écran compact, accessible rapidement
.
- tension batterie de propulsion
- consommation
- courant