ce texte se rapporte à la version V4, plus simple que la version V2
Exit
Open choisir un fichier, le charger en le validant.
ReOpen
comme son nom le dit ouvre à nouveau le dernier fichier utilisé par
l'émetteur ou par le simulateur
Ceci est très pratique en cours de mise-au-point :on laisse le simulteur
ouvert et dans une autre fenêtre on édite le fichier du modèle.
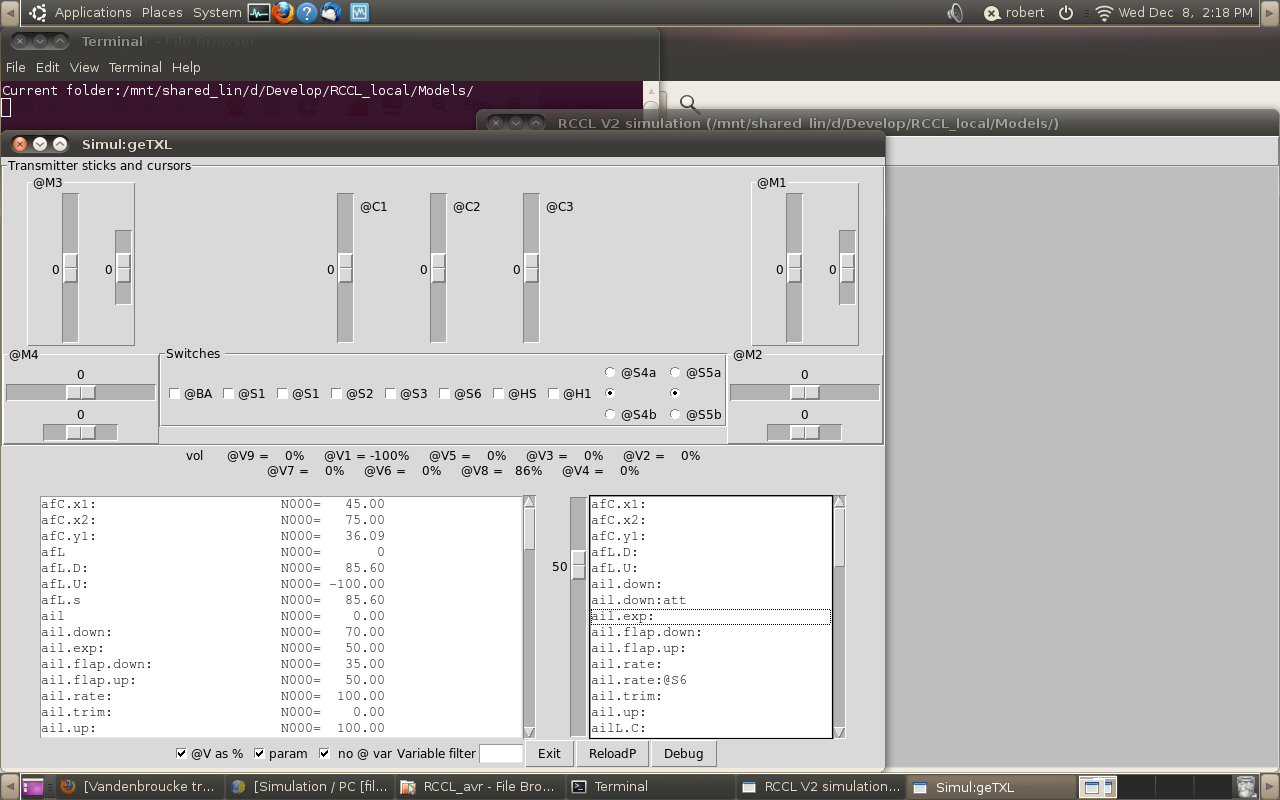
Vous voyez une fenêtre avec
l'émetteur ( configuration choisie lors de la construction).
En arrière plan:
- le programme principal du simulateur, qui peut afficher des
messages d'erreur
- en violet, la console, qui affiche parfois des erreurs
Examinez
la fenêtre: on y trouve en haut les organes de commande manches, les
trims, les curseurs,
les interrupteurs (2 et 3 positions) .
En
dessous on voit une ligne avec d'abord la phase ( vol ) et les
signaux envoyés vers les servos. Ici
ils sont en pourcents.
Ensuite on affiche à gauche une liste de variables.
Les paramètres en-dessous de la liste permettent de choisir ce qui est
affiché:
Actionnez n'importe quel organe de contrôle, les positions des servos suivent.
Les
opérations avec
ralentissement (changement de phase, NUMT) et la télémétrie ne sont
pas
simulées
Ceci n'est d'ailleurs pas nécessaire
pour apprendre à programmer un modèle.
En même temps, vous ouvrez dans
l'éditeur de votre choix le fichier source (xxx.mdx)
Pour
mettre le programme au point, vous avez accès à toutes les variables
dans l'état où elles sont en fin d'itération.
Evitez donc de réutiliser une variable, pour visualiser toutes les
étapes intermédiaires.
Une bonne méthode: remplissez progresivement le modèle, en testant chaque
étape:
Installer préalablement Python , en
version 2.x (ne pas utiliser la version 3.x).
Pour
Windows, Python est
disponible ici: http://www.python.org/download/
, choisir le
Windows installer qui
est un fichier d'installation classique ".msi". Il suffit de cliquer
pour installer Python, installé par défaut dans c:\Python26.
Pour Linux, vous ne devez pas avoir de problème , Python est
disponible dans la plupart des distributions.
©
Copyright 2008-2012 Robert Spilleboudt - Tous droits réservés.
Projet
rcopensource - Licence GPL V2